-
 202302-02
202302-02三菱インバータの過負荷故障判定方法
1.モータの三相電力がバランスしているかどうかを検査する(1)モータの三相電圧のバランスが取れていない場合は、三菱インバータの出力端子の三相電圧を再度確認してください。(2)三菱インバータ三相電圧も不均衡···
-
 202302-01
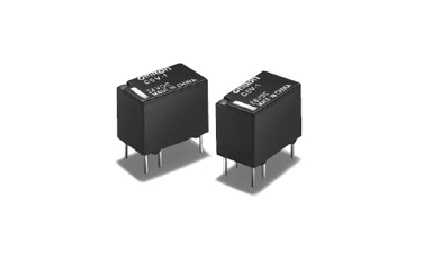
202302-01オムロンリレーのメンテナンスポイント
1.設置に使用するオムロンリレーハウジングの表面には、傷、ひび割れ、損傷がないこと。深刻な損傷がある場合は、同じ仕様の無傷のリレーを時間内に交換する必要があります。2.オムロンリレーのメンテナンスプロセス···
-
 202301-31
202301-31デルタデルタ過負荷トリップ故障ソリューション
1、VFD過負荷の主な理由(1)機械的な過負荷。過負荷の主な特徴はモーターの発熱であり、ディスプレイ上の動作電流を読み取ることで発見することができます。(2)三相電圧の不均衡により、一相動作電流が過大になり···
-
 202301-31
202301-31デルタデルタのインパルス電流がインバーターに及ぼす影響
インバーターのメンテナンスプロセスでは、固定子巻線の逆起電力、同期発電機の条件下でのモーターの起電力、および自己誘導起電力の電流の影響により、電流の影響が必然的にモーターに影響を与えることがわかります···
-
 202301-30
202301-30ABBインバータの故障コード
1、ABBインバータ故障コード: 0001原因:出力電流がトリップ値を超えている対策:モーターの負荷を確認し、加速時間を確認し、モーターとモーターケーブル(フェーズシーケンスを含む)を確認します。2、ABBインバータ···
-
 202301-30
202301-30ABBインバーターのパラメータ設定方法
1、GROUP 99パラメータ:標準マクロを選択するマクロを適用し、モーターのブランドデータに基づいてモーターの評価を行い、設定値を変更します。2. GROUP 10パラメータ:パラメータ1001が1かどうかを確認します。ない場···

日本語
- English
- 简体中文
- Español
- Pусский
- français
- Deutsch
- italiano
- Português
- 日本語
- हिंदी
- 한국어
- Tiếng Việt
- ภาษาไทย
ニュース


連絡先
 +8618621383628
+8618621383628
 +8613811814778
+8613811814778
 info@zhongpingtech.com
info@zhongpingtech.com
 中国北京市朝陽区麗園コミュニティビル26
中国北京市朝陽区麗園コミュニティビル26