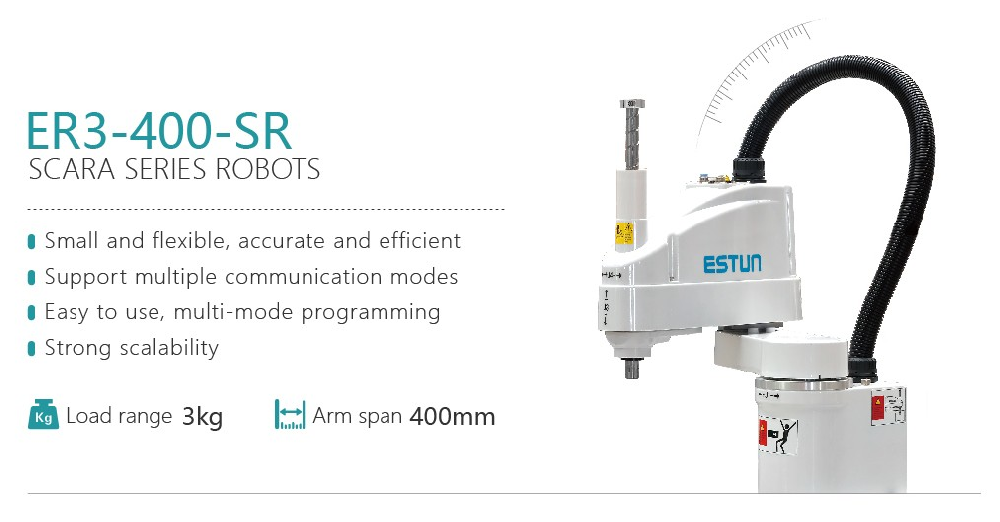
ESTUN ER3-400-SRは,厳しい産業環境で精密な組立,処理,検査タスクのために設計された高性能4軸SCARA (Selective Compliance Assembly Robot Arm) ロボットです.コンパクトな足跡,400mmの範囲,および±0.01mmの繰り返し可能性で設計されたこのロボットは,電子,自動車部品,医療機器製造,および一般的な自動化で一般的な高速で高精度なアプリケーションで優れています.統合されたサーボ制御と空心の手首設計は,ケーブリングを簡単にし,信頼性を高めます.
主要な仕様
モデル: ER3-400-SR
タイプ: 4軸SCARA産業ロボット
範囲(アーム長):400 mm
最大ペイロード:3kg(エンドエフェクター重量を含む)
繰り返し性: ±0.01 mm
最高速度: > 10,000 mm/s(線形)、> 200°/s(回転J3/J4)
自由度:4(X、Y、Z、Rz - Z軸周りの回転)
コントローラー:ESTUN ERC3シリーズ(統合またはキャビネットタイプ)
保護クラス: IP54(標準、防防防防防防防防保保保護クラス:IP54)
取付け: ベンチの取付け
重量:約25kg
通信インターフェイス: EtherCAT、イーサネット、RS-485、デジタルI/O(標準)、CANopen(任意)
デザイン&アンプ;構造:厳格さと信頼性のために構築
ER3-400-SRは,堅固な堅堅固なER3-400-SRアルミニウム合金構造を特徴としており,振動を最小限に抑え,ミクロンレベルの精度にとって重要な長期的な硬度を保証しています.空心の手首のデザインは,空気線,電気ケーブル,または真空ホースが腕の中央をクリーンに通過することを可能にする特徴です.これにより,外部ケーブル管理の問題を排除し,摩耗を減らし,停滞を防ぎ,故障間の平均時間 (MTBF) を大幅に改善します.最初の2軸の高性能ACサーボモーターと精密ハーモニックドライブは,SCARAプラットフォームで有名な例外的な速度と位置精度を提供します.Z軸は,安定した垂直運動のために精密ボールネジを使用します.
コア機能&アンプ;能力
高速精密ピック&アンプ;場所: PCBに小さな部品を置く,コネクタを插入するか,部品を分類するのに最適です.
精密アセンブリ:スクルードライビング,プレスフィッティング,スナップフィッティング,およびミリメートル以下の精度を必要とする複雑な部品アセンブリ.
自動検査&アンプ;テスト:AOI(自動光学検査)、機能テストプローブ、またはセンサー配置のための視覚ガイドされた位置決定。
材料取り扱い:小さな部品を機械(CNC、プレス、注射成形)、パッケージ、キットにロード/アンロード。
配分 &アンプ;シーリング:接着剤、シーラント、シーシーリング、または溶接ペーストの正確な適用。
実験室自動化:サンプル処理、液体転送、および機器のインターフェイス。
包装およびアンプ;展開
ER3-400-SRロボットアームは通常,堅固な泡保護を備えた安全な箱で出荷されます.標準パッケージには,ロボットアームと必要な取り付けハードウェアが含まれています.ERC3コントローラーは別途出荷されます。ESTUNは,ワークセルにシームレスに統合するための包括的なインストールマニュアル (物理的およびデジタル) およびCADモデルを提供しています.ESTUNのユーザーフレンドリーなプログラミング環境 (ESTUN ECS) と共通のフィールドバスプロトコルのサポートにより,展開が簡素化されます.
アプリケーションドメイン
このSCARAロボットは,速度,精度,コンパクト性を要求する産業で広く使用されています.
電子製造:PCB組み立て,SMD部品処理,コネクタ/ケーブル組み立て,テスト.
自動車部品:センサー,スイッチ,ポンプ,小さなアクチュエータの組み立て;テスト。
医療機器製造:注射器,吸入器,診断機器の組み立て;研究室の自動化。
消費品の組み立て:小さな家電、化妆品の包装、おもちゃの組み立て。
一般産業:精密機械化傾向,小部品の包装,品質管理検査ステーション.
競争優位性
例外的な精度: ±0.01mmの繰り返し性は,マイクロアセンブリで一贯した品質を保証します.
コンパクト&アンプ;アジャイル:小さな足跡により,密集した生産ラインでスペース利用を最大限にします.
空の手首の設計:ケーブルの混乱,メンテナンス,および故障ポイントを大幅に減らします.
高速:最適化されたサイクル時間はスループットと生産性を高めます.
堅固な構造:IP54評価と耐久性の高い材料は,産業環境で信頼性を保証します.
シームレスな統合:EtherCATサポートとESTUN ECSソフトウェアは,接続性とプログラミングを簡単にします.
コスト効率の高い自動化:競争力の高いTCO(総所有コスト)で高性能を提供します。
サポート&アンプ;サービス
ESTUNは、以下を含む包括的なグローバルサポートを提供しています。
標準1年の保証(拡張可能なオプションが利用できます)。
詳細な技術文書,マニュアル,CADモデルにオンラインでアクセス.
リモート診断およびトラブルシューティングサポート。
現場のサービスとメンテナンスのための訓練された技術者のグローバルネットワーク。
オペレーターやプログラマーのためのトレーニングプログラム。
製品Q&アンプ;A: あなたのトップクエリーに答える
Q1: ESTUN ER3-400-SR SCARAロボットが優れる主要なアプリケーションは何ですか?
A1: ESTUN ER3-400-SRは,コンパクトなワークスペース内の高速度とミクロンレベルの精度を組み合わせたアプリケーションで本当に輝く.その核心的な強みは,電子製造セクター,特にPCBにミニチュアSMDコンポーネントの高速ピックアンドプレイス,コネクタの精密埋め込み,自動光学検査 (AOI) 位置決定にあります.エレクトロニクス以外に センサーや燃料注入器の部品など 複雑な自動車部品の組み立てで 広く使用されており 繰り返し可能な精度が最も重要です空心の手首の設計は,また,ケーブルの内部保持が信頼性と汚染を避けるために不可欠な消費品の組立および医療機器の製造における,分配アプリケーション (接着剤,シーラント,溶接ペースト) およびスクルードライビングタスクにも理想的です.
A2: さらに,その敏捷性とペイロード容量は,小さなCNC工場,車床,または注射成形機を含む機械の傾向作業に適しています.小さなワークピースを効率的にロード/卸載します.実験室自動化設定では,ER3-400-SRは,サンプルチューブの操作,液体処理のピペット付け,分析機器とのインターフェースなどの微妙なタスクを信頼性の高いように処理します.IP54の評価は,これらの産業やクリーンルームに隣接する環境で一般的なIPIPIP54の評価により,IPIP54の評価が低いロボットよりもより多くの展開の柔軟性を提供します.基本的に,直径400mmの円内の3kg未満の部品のために速く,精密で繰り返し可能な動きを必要とする任意のプロセスは,このSCARAロボットに優れた候補者です.
A3: より大きなSCARAや6軸アームと比較して,ER3-400-SRの主要な利点は,特定の範囲とペイロードに適したタスクに最適化することです.小さな部品の大量で大量のミックス生産のためにパフォーマンスと価値の魅力的な混合物を提供します.EtherCATを通じて統合しやすく,ユーザーフレンドリーなプログラミングは,これらの特定のタスクの自動化採用の障壁を減らします.スペースが高く,精度が交渉できない場合,例えば,混雑したSMTラインやコンパクトテストステーション内では,ER3-400-SRはしばしば最適な自動化ソリューションです.
Q2: ER3-400-SRの空首の設計は私の自動化セルにどのように利益を与えるのでしょうか?
A1: 空首の設計は,ESTUN ER3-400-SRの主要なエンジニアリングの利点であり,ロボット自動化における共通の痛みポイントであるケーブル管理に直接取り組んでいます.ロボットの前臂の中心部を垂直に下げ,J4 (手首回転) 軸を通じて運行する専用チャネルを提供することで,すべての必要なユーティリティ - グリッパー用の空気線,センサーまたはツール用の電気ケーブル,サクションカップ用の真空ホース,または分配用の小さな流体線 - を内部でルートすることができます.これにより、外部ケーブルキャリアやドレスパックが通常ロボットアームの上に覆われるか、そばに走る必要性がなくなります。
A2:利点は大きい。まず,固定器や他の機械に対する絶えず曲がり,扭曲し,最最終的に引き起こされるケーブルの磨損を大幅に減らします.これにより,信頼性が高まり,ケーブル寿命が長くなり,メンテナンスやケーブル交換のダウンタイムが大幅に短縮されます (改善されたMTBF).第二に,職場から潜在的な障害の危険を取り除くことによって安全性を向上させます.第三に、ロボットの性能の一致性を向上させます。外部ケーブルは質量を増加し,高速移動中に高外外部ケーブルは外外部ケーブルの質量を増加させ,高速移動中に外外外外部ケーブルは外外外部ケーブルの質量を増加させ,内部ルーティングはこの変数を削除します。最後に、よりクリーンでプロフェッショナルに見えるワークセルをもたらします。
A3: この設計は,複雑なエンドエフェクターを必要とするアプリケーションや,外部ケーブルが不実用または損傷する傾向がある狭い空間で動作するアプリケーションにとって特に重要です.また,複雑な外部ケーブル管理ソリューションを設計する必要はないため,統合者のためのセル設計プロセス全体を簡単にします.エンドユーザーにとっては,メンテナンスの削減と,ケーブル関連の故障の減少による全体的な機器効率 (OEE) の向上による長期的な運用コストの削減を意味します.これは、ロボットの操作強度を大幅に高める機能です。
Q3: ESTUN ER3-400-SRにはどのようなコントローラーとプログラミングオプションが利用可能であり、統合がどれくらい簡単ですか?
A1: ESTUN ER3-400-SR SCARAロボットは,ESTUN ERC3シリーズロボットコントローラによって動力を提供しています.このコントローラーは,ロボットベースに直接取り付けられるコンパクトで統合されたコントローラーユニット (スペースを節約するために理想的) または大規模なインストールのための伝統的なキャビネットスタイルのコントローラーです.ERC3コントローラは強力なリアルタイム産業PCプラットフォームに構築され,EtherCATフィールドバスをコアコミュニケーションバックボーンとして利用し,高速で決定的な制御とPLC,ビジョンシステム,I/Oモジュールなどの他の自動化機器との優れた同期を確保します.
A2: プログラミングは主にESTUNの独自のECS(ESTUN制御システム)ソフトウェアを使用して行われます。ECSは,異なるユーザーのスキルセットに合わせて複数のプログラミング方法を提供しています.グラフィックで直感的な教えるペンダントインターフェースにより,オペレータはロボットを手動でジョグし,ポイントを教え,シーケンスを簡単に構築できます.より複雑な論理と高度なユーザーのために,標準的なPLC言語 (構造されたテキストなど) に似たテキストプログラミング言語をサポートし,モーション制御コマンド,I/O処理,プログラムフロー制御の豊富なセットを提供しています.ECSはドラッグ・アンド・ドロップブロックプログラミングもサポートし,PLCロジックからロボットに移行するユーザーにアクセスできます.シミュレーションとオフラインプログラミング機能も統合されています.
A3:既存の自動化システムへの統合を合理化します。標準的なEtherCATインターフェースは,多くの主要なPLCブランド (シーメンス,ベックホフ,ロックウェルオートメーションゲートウェイなど) に直接,高速接続を可能にし,厳密な制御協調を可能にします.基本的なツールとセンサー制御のために包括的なデジタル I/O (入力/出力) が提供されています.RS-485やイーサネット(TCP/IP)などの追加通信オプションは標準であり、CANopenはしばしばオプションとして利用できます。ESTUNは幅広いドキュメント,CADモデル,サンプルコードを提供し,機械と電気の統合を容易にします.強力で柔軟なコントローラーと業界標準のインターフェイスの組み合わせにより,ER3-400-SRはさまざまな産業環境に統合することが比較的簡単です.

 +86 010-64225983
+86 010-64225983 +8613811814778
+8613811814778 info@zhongpingtech.com
info@zhongpingtech.com 中国北京市朝陽区麗園コミュニティビル26
中国北京市朝陽区麗園コミュニティビル26