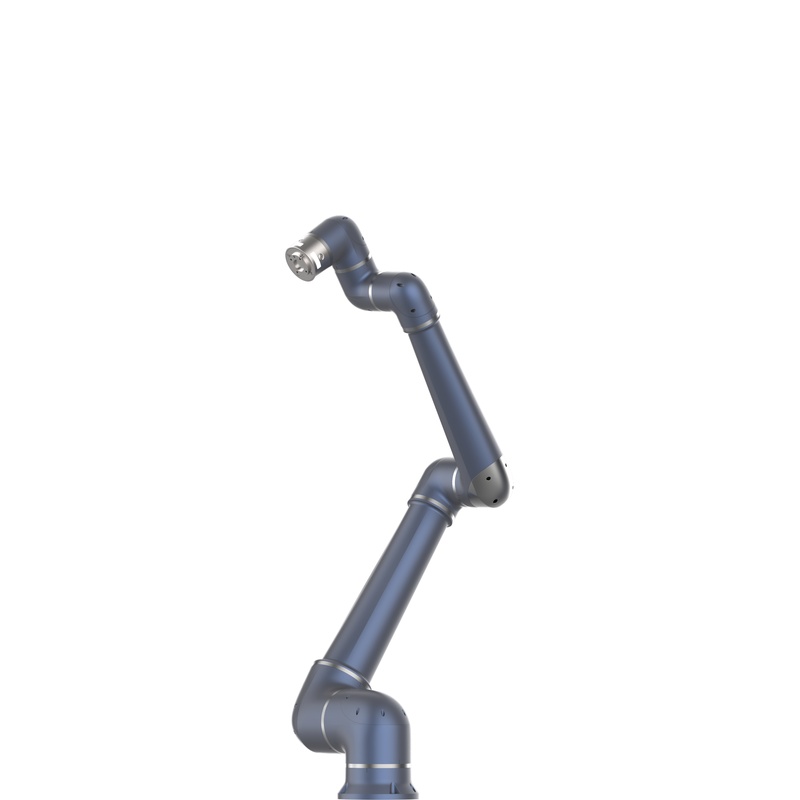
ESTUN S10-140 Pro:アーク溶接用の高性能6軸ロボットソリューション
ESTUN S10-140 Proは,産業用溶接と重材料処理に革命をもたらすために設計された重型コラボレーティブロボットです.堅固な10kgのペイロードと
広大な1400mmの範囲、このモデルは大規模なアーク溶接システムおよびパレット化のタスクのための必要なワークスペースおよび強さを提供します。
専門溶接ソフトウェアパッケージと高解像度トルクセンサーを装備したS10-140 Proは、高品質のために必要な滑らかで一贯した動きを提供します
溶接ビーズ。その高度な制御システムは専門的な溶接電源とシームレスな統合を可能にし、自動車のスマートな製造のための基石を作ります
そして金属製造部門。
詳細な技術仕様
S10-140 Proは、コラボレーティブロボットの安全性と伝統的な産業マニピュレーターの性能を組み合わせています。主要な技術的パラメータは:
自由度(DOF):6軸
評価されたペイロード:10 kg
最大範囲:1400 mm
ポーズの繰り返し性:±0.03 mm
最大ツール速度:2.8 m/s
入口保護:IP54(腕)/IP20(キャビネット)
安全基準:ISO 13849-1、ISO 10218-1
コミュニケーション:EtherCAT、Modbus TCP、I/O
ロボット重量:38 kg
消費電力: ~500W(典型的)
主要な特徴とエンジニアリングの利点
S10-140 Proは,長い溶接サイクル中にアークの安定性を維持するために不可欠な機械的な偏折を最小限に抑える高刚性構造を特徴としています.1400mm は
レッチはロボットが車両のシャシーや構造鋼フレームなどの大きなワークピースを追加の線形トラックの必要なしで処理することを可能にします。
「Pro」シリーズは、先進的な轨道追跡技術で特徴付けられています。2ms制御サイクルおよび20ビットエンコーダーを利用することによって、ロボットは溶接トーチを保証します
プログラムされた次のミリメートルの精度の次次のミリメートルの精度でプログラムされたポスト溶接の研磨または再作業の必要性を大幅に減らします。
安全性は多層センサーシステムを通じて管理されます。S10-140 Proは「コラボレーティブモード」で動作することができ、人間が近くにいるときに遅くなります。
モード"区域が明確であるとき。この柔軟性は、国際的な安全プロトコルに厳格に従う間、生産スループットを最適化します。
主なアプリケーションシナリオ
アーク溶接システムでは、S10-140 ProはMIG、TIGおよびレーザー溶接に使用されます。その広い範囲と6軸の柔軟性により、複雑な関節と狭い角度にアクセスできます。
全アセンブリ全体で深い浸透および一贯した溶接品質を保証する人間の溶接業者のために困難です。
重型組み立てのために,10kgのペイロードは,ロボットが重い空気グリッパーと部品を同時に運ぶことができます.電器産業で頻繁に使用されています
洗衣機のドラムや冷蔵庫のフレームを組み立てるために,レッチと強さの両方が必須要件です.
S10-140 Proは,小型から中型のボックスのパレット化とパレット解除にも非常に効果的です.その範囲は、高い標準パレットに製品を堆積することを可能にします
その協力的な特徴は、従来の安全精密の精精密性を通じて、従来の安全フェンシングなしで倉庫の人員と共有スペースで働くことができます。
インストールおよび操作指示
S10-140 Proは,重型鋼基台または専用溶接テーブルに取り付けられる必要があります.その1400mmの範囲および10kgのペイロードを考慮して、取付け表面は可能でなければなりません
高速方向変化中に生成される動的力に耐え,精度の損失を防ぐ.
溶接電源をEtherCATまたはデジタルインターフェイスを介して制御キャビネットに接続します。これにより、ロボットは電流、電圧、およびのような溶接パラメータを制御することができます
リアルタイムでワイヤーフィードの速度、アークの開始を同期し、ロボットの動きパスと完全に停止します。
教学段階の間、溶接溶溶接溶溶接トトトーチを導くために手動ガイダンス機能を使用してください。アーク溶接のために、「作業角度」および「旅行角度」を定義することは不可欠です
正確にトーチ。S10-140 Proのソフトウェアには、このプロセスを簡単にするための専用溶接テンプレートが含まれています。
重要な安全とメンテナンスノート
アーク溶接で使用すると,ロボットとそのケーブルは火花や溶接スパッターから保護されなければなりません.特殊な耐熱ロボットジャケットを使用し、溶接を確認します
地面ケーブルは,ロボットの軸受を通じて流れる電流を防ぐためにワークピースに正しく付けられています.
溶接トーチのワイヤーフィーダーと接触先を定期的に確認します。閉じ込まれた端は,ロボットの第5軸と第6軸に摩擦と機械的ストレスを増やす可能性があります.定期的な
ロボットの接合物のクリーニングは,IP54の保護が細金属の細細細金属ロロロボットのロロロボットの接合物のクリーニングにより,細金属のロロロボットの接合物のクリーニングにより,
常にアークパワーをオフにして新しい溶接プログラムの"ドライラン"を実行します。これにより、オペレータはトーチがワークピースと衝突しないか確認することができます
固定装置および高柔軟ケーブルは動きの全範囲を安全に完了するために十分な固定十分です。
よくある質問(FAQ)
S10-140 Proはどのようにアーク溶接の電磁干アアに対処しますか?
S10-140 Proは,内部センサーと制御電子機器を保護するために産業級の電磁互換性(EMC)シールディングを搭載しています.これはアーク溶接で不可欠です
高周波が始まり、高電流アークが大きな電気高音を生成することができる環境。
ロボットアームと制御キャビネットの間のすべての通信は,シールドケーブルと差異信号を通じて処理されます.この設計は、20ビットのエンコーダーデータを保証します
ロボットは,溶接プロセス中に"霊"の衝突や信号の落ち込みを経験しないことを正確に保持します.
また、ロボットの電気接地から分離された溶接電源のために専用の接地システムを使用することもお勧めします。これは「グラウンドループ」を防止し、
高い溶接電流がロボットの敏感な接合点または主要なCPUを通過しないことを保証します.
1400mmの範囲はさらに大きなワークピースに拡大できますか?
S10-140 Proの物理的な範囲は1400mmに固定されていますが,その作業エンベロップはロボットを線形トラックまたはガントリーシステムに取り付けることによって効果的に拡大できます.
ESTUN制御キャビネットは,外部7軸ハードウェアと簡単に同期することができるEtherCATをサポートします.
線形トラックを追加することで,ロボットは長い組み立てラインに沿って移動し,一連のワークピースまたは単一の非常に長い部分で溶接を行うことができます.ソフトウェア自動化
基本の動きを補償し、動くフレームに対する溶接トーチの精度を維持します。
さらに熟練性を必要とするアプリケーションでは,ロボットは2軸溶接ポジショナーと統合できます.これはロボットがいる間、ワークピースを回転し、傾けることができます
溶接,溶接プールが常に最大強度のための最適な"平ら"位置にあることを確保します.
溶接電源はS10-140 Proと互換性があります。
S10-140 Proはオープンなコミュニケーションアーキテクチャで設計されており、ミラー、リンカーン・エレクトリック、フロニウスなどの主要なグローバル溶接ブランドと互換性があります。
ケンピーほとんどの現代的な電源は,EtherCAT,Profinet,または標準的なアナログ I/O を通じてリンクできます.
デジタルインターフェイスを使用すると、ロボットは「パルスアーク」または「冷たい金属の転送」のような高度な溶接機能にアクセスできます。この深い統合は、ロボットが溶接を調整することができます
現在処理中の接合体の特定の几何学に基づくオンフライパラメータ。
ESTUNは,トーチ,ワイヤーフィーダー,インターフェースケーブルを含む事前に設定された溶接パッケージも提供しています.これらの「プラグアンドプレイ」キットは、統合時間を短縮し、すべての
部品はS10-140 Proの高速モーション機能に完璧に一致しています.
S10-140 Proは重型パレット化に適していますか?
はい、10kgのペイロードと1400mmの範囲は、S10-140プロを中型商品のパレット化のための優れた選択です。標準的なユーロパレットのすべての角に簡単に到達できます
または米国パレット、高い位置精度を維持しながら重要な高さに箱を堆積します。
ロボットのコラボレーティブ機能は、フォークリフトや手動ピッカーが活動しているオープンエリアで動作することができるため、パレット化における主要な利点です。ロボットが人を検出した場合
その道は、自動的に忙しい倉庫環境の事故を防ぐ、その速度を減らすか、停止することができます。
パレット化作業のために,ロボットは真空グリッパーまたは機械クランプを装備することができます.ロボットのフランジの内蔵I/Oは、グリッパーの直接制御を容易にします、簡単にします
配線および第6軸の高回転運動の間にケーブルの配配線のリスクを減らすこと。
S10-140 Proはどのようにセーフティケージなしで安全性を保証しますか?
S10-140 Proは,6つの接頭のそれぞれに非常に敏感なトルクセンサーを使用して外部力を監視します.ロボットがより強力な障害物に遭遇した場合
ユーザー定義された安全安全安全安全ユユーザー定義された安全安全安全ユユユユーザーによって定義された安全ユユユーザー定義された安全ユユユーザー定義された安全ユユーザー定義された安全ユーの
システムは、コントローラにプログラムできる「セーフティゾーン」と「仮想壁」もサポートしています。これらの見えない障壁は ロボットの動きを特定の領域に制限します
アームまたはツールが人間の操作者が存在すると期待される領域に入ることを確保すること。
高速アプリケーションで最大限の安全のために,ロボットは外部レーザースキャナーと統合できます.これらのスキャナーは安全周囲を作成します。誰かが入ったら
「警告ゾーン」は、ロボットが遅くなり、「危険ゾーン」に入ると、ロボットは完全に停止します。
このモデルの20ビット絶対エンコーダーの利点は何ですか?
20ビットの絶対エンコーダーは,各ジョイントの回転当たり100万ポイント以上の解像度を提供します.この極端なレベルの詳細は、制御システムを非常に精密にすることができます
ロボットの位置への調整は、S10-140 Proが知られている±0.03mmの繰り返し性をもたらします。
エンコーダーは"絶対的"であるため,電源停止後でも,ロボットは常に3D空間で正確な位置を知っています. 「ホミング」シーケンスや移動を行う必要はありません。
システムがオンになるたびに校正ポイントにロボットは、貴重な生産時間を節約します。
これらのエンコーダーは、動きの滑らかさにも貢献します。モータードライブに高周波フィードバックを提供することによって、それらは"cogging"またはマイクロスタッタリングを除去します
安定した弧と均一な溶接ビードを維持するために重要な低解像度ロボットで見つかりました。
手動ガイダンス機能は,溶接パスの設定にどのように役立ちますか?
しばしば"リードスルー教え"と呼ばれる手動ガイダンスは,溶接エンジニアがロボットアームを握り,物理的に望まれる溶接経路沿いにトーチを動かすことができます. 「 The
ロボットのセンサーは腕の重さをキャンセルし、重さがなく、操作容易に感じます。
この方法は,ジョイスティックを使用したり,複雑な複複複雑なこの複複雑なこのこのこのこの方法は,複雑なこのこの曲がったこのこのこのこの複雑なこのこのこの方法よりもはるかに直感的です.オペレータは正確にトーチを位置することができます。
傾斜角度を設定し、フランジの単一のボタンプレスでポイントを記録します。
パスが記録されたら,ソフトウェアは自動的にポイントを滑らかにし,完璧な轨道を作成できます.この機能は、新しい設定に必要な時間を大幅に短縮します。
S10-140プロを小さなバッチおよび"ハイミックス"製造のために非常にコスト効果的な作る部品。
S10-140 Proは高精度なTIG溶接に使用できますか?
TIG溶接(タングステンTIG溶接ガス)は、非常に厳しいアーク長さが必要なため、最も要求的な溶接プロセスの1つです。S10-140 Proの高い繰り返し性
振動のない動きは,高品質のTIGアプリケーションを可能にする数少ないコラボレーティブロボットの1つです.
ロボットの制御システムは,プリフローガス,高周波アークスタート,および電流の徐々なランプを含む複雑なTIGスタートシーケンスを管理できます.正確なZ軸
制御はタングステン電極がワークピースから一定の距離に滞在し、汚染を防ぐことを保証します。
TIGアプリケーションでは、最大速度よりも轨道精度を優先する「高精度」モードでロボットを使用することをお勧めします。これは溶接プールを保証します
安定しており,熱の影響を受けたゾーンが最小限に抑えられ,美学的に楽しく,構造的に健全な溶接につながります.
ロボットの接頭や減速器にはどのようなメンテナンスが必要ですか?
S10-140 Proは,最小限のメンテナンスで長期的な産業用に設計されています.ジョイントで使用されるハーモニック減速器は、正常な動作の下で寿命のために調調調調調節されます
条件。ただし、ハイデューティサイクル溶接アプリケーションでは、グリースの年間検査が推奨されます。
メンテナンスの主要なタスクは,保護シールと外部ケーブルの完整性を確認することです.溶接環境では、ケーブルは強烈な紫外線光および熱に暴露されます、
外部のジャケットが時間とともに脆弱になることができます。これらのケーブルが故障する前に交換することにより、予期しないダウンタイムを防ぐことができます。
また、関節の定期的な「バックラッシュチェック」をお勧めします。操作の5,000時間ごとに腕の機械的な遊びを測定することによって、磨損を監視できます
減速器および潜在的な故障の早く前に必要なサービスを計画します。
オフラインプログラミング(OLP)のためのソフトウェアツールはどのようなものですか?
S10-140 Proは、RoboGuide、Visual Components、ESTUN独自のシミュレーションツールを含むいくつかの主要なオフラインプログラミングソフトウェアスイートと互換性があります。OLPにより
ロボットに転送する前に コンピュータで溶接プログラムを作成し テストするエンジニアです
これは,衝突のないパスを手動で計算することが時間をかかすすぎる複雑なアセンブリで特に有用です.ソフトウェアは溶接全体をシミュレートできます
ロボット、トーチ、ジグ、およびワークピースを含む細胞は、「最初の正しい」プログラムを保証します。
オフラインプログラミングでは「シームトラッキング」シミュレーションも可能です。レーザーシームトラッカーまたはタッチセンシングの最良の取り付け位置を決定するためにソフトウェアを使用できます
ロボットが実際の溶接プロセス中の物理部品の変化を補償できることを確保するプローブ。

 +86 010-64225983
+86 010-64225983 +8613811814778
+8613811814778
 中国北京市朝陽区麗園コミュニティビル26
中国北京市朝陽区麗園コミュニティビル26