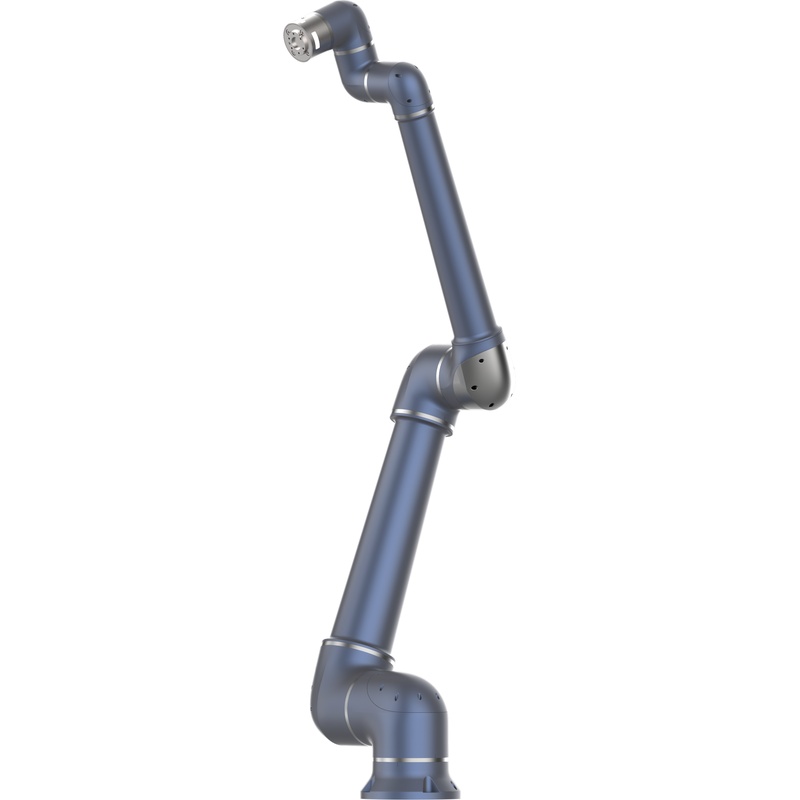
ESTUN S20-180 Pro:重い部品転送のための高ペイロード6軸ロボット
ESTUN S20-180 Proは,重型材料処理と大規模な自動化のために設計された高性能産業用コラボレーティブロボットです.20kgの組み合わせ
重要な1777.5mmの範囲を持つペイロード容量、このモデルは伝統的な産業電力と協力システムの柔軟な安全性の間のギャップを橋梁にします。
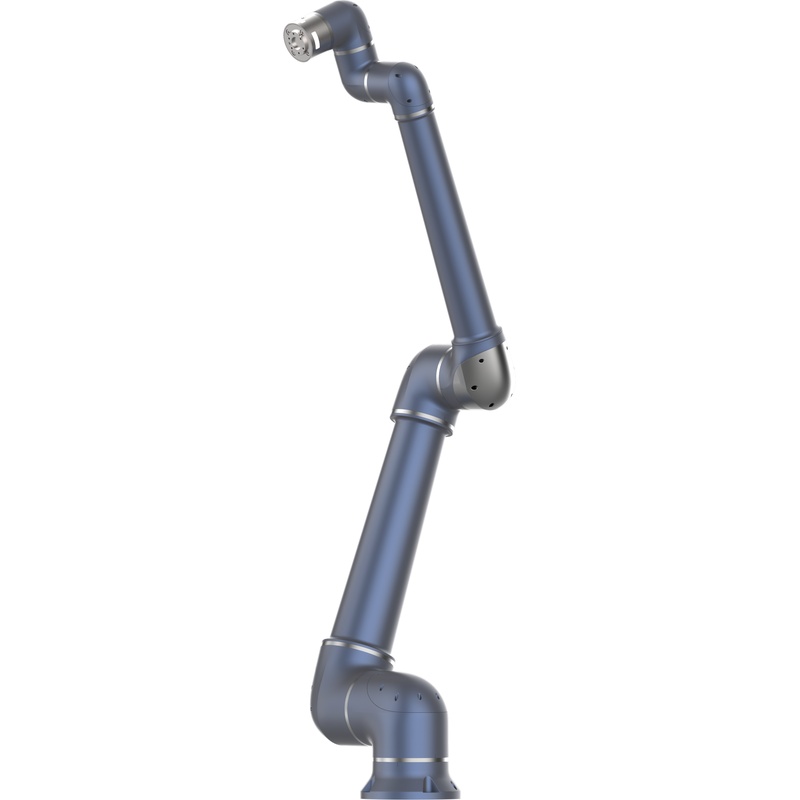
20ビットの絶対エンコーダーと6軸全ての高精度トルクセンサーを搭載したS20-180 Proは,最大負荷でも精密な動きを提供します.その
産業等級のモーション制御は,信頼性とオペレータの安全が共存しなければならない自動車組立,パレット化,および大型部品移動のための最優れた選択をします.
主要な技術仕様
自由度(DOF):6軸
評価されたペイロード:20 kg
最大範囲:1777.5 mm
ポーズの繰り返し性:±0.05 mm
最大ツール速度:3.2 m/s
入口保護:IP54(標準)
安全認証:EN ISO 13849-1 PLd Cat.3
通信プロトコル:Modbus TCP、EtherCAT、RS485
典型的な電力消費量:0.75 kW
マニュペレータの重量:59 kg
エンジニアリングの特徴と運用の利点
S20-180 Proは,ESTUNの独自の運動補償技術を活用し,ペイロードの重量に関係なく,轨道の精度が一致していることを保証します.この
離心力と重い部品の転送にとって重要です。離離心力と離離心力と離離離心力はしばしばより小さいロボットアームの精度を妥協させることができます。
セキュリティはハードウェアレベルで統合されています。 「プロ」シリーズは調節可能な衝突検出および敏感なトルク監視を特徴としています。協力的なワークスペースでは、ロボットはできます
小さな抵抗を検出し、すぐに停止し、多くの重型物流シナリオで伝統的な安全フェンシングなしで動作することができます。
プログラミングはグラフィカルユーザーインターフェイスと「アジャイルなマニュアルガイダンス」を通じてシンプル化されます。20kgの容量にもかかわらず、腕は「教える」ために単一のオペレータによって簡単に移動できます。
モーションパス。これにより,CNC機械の傾向や自動車部品のパレット化などの複雑なタスクの展開時間が短縮されます.
高影響応用シナリオ
自動車業界では,S20-180 Proはドアパネルやバッテリーモジュールなどの重いサブアセンブリを転送するために頻繁に使用されています.その1777.5mmの範囲はそれを可能にします
サービスの複数の駅、コンベヤーから部品を取り、高精度で移動する組み立てラインにそれらを置く。
包装および物流業界は,中重量から高重量のパレット化のためにS20-180 Proを採用しています.20kgのペイロードは重型真空または機械の使用を可能にします
大きな箱または袋を取り扱うグリッパー。3.2 m/sの速度は,高速生産出力と同時に進むことを保証します.
金属製造工場は,機械の傾向と大型部品の取り扱いのためにロボットを使用しています.それは容易に金属の空白の重量および必要な力を管理できます
重いスタンピングプレスまたはCNCフライシングセンターを積み出し、工場全体のスループットを大幅に改善します。
インストールとセットアップ手順
S20-180 Proを強化鋼基またはISO 9409-1-50-6-M6フランジを使用して7軸線形レールに固定します。20kgのペイロードおよび長い範囲を考えると、基礎は必要です
高速加速および減速段階で振動を防ぐために非常に堅い.
電気統合はCOB-A20またはCC20-A制御キャビネットで処理されます。電源が0.75kWの典型的な評価に一致し、接地が適切であることを確認します
重工業環境で発生することができる電気重重重重重工業環境で発生することができる電気重重工業環境から20ビットのエンコーダーを保護するために設置された。
通信のために,組み込まれたEtherCATまたはModbus TCPポートを使用してロボットをプラント全体のPLCシステムとリンクします.1777.5mmのアームレッチには、明確な「安全ボリューム」設定が必要です
作業の境界を定義し、構造的な柱や他の機械との衝突を避けるソフトウェアで。
メンテナンスと安全保障
S20-180 Proは24/7操作のために設計されていますが、ハーモニック減速器の定期的な点検が推奨されます。それはより重い負荷を取り扱うため、グリースをチェックします
条件および関節で熱蓄積が起こらないことを保証することは,精密機械部品の寿命を延長します.
20kgの限界で部品を取り扱うときは、常にロボットのソフトウェアの重心(COG)を確認してください。COG計算の間違いは、モーターの早期的な磨損につながる可能性があります。
そして高速運動中に偽の衝突検出イベントを引き起こす可能性があります。
S20-180 Proのメンテナンスを行う必要は認定された人員のみです。常にサービスの前に主力を切断し、STO(安全なトルクオフ)機能を利用します
ロボットのワークスペースに入るとき、オペレータの完全な保護を確保するための教えや検査。
よくある質問(FAQ)
S20-180 Proの最大範囲とペイロード容量は何ですか?
ESTUN S20-180 Proは、最大20 kgのペイロードで重型作業を処理するために設計されています。この容量には、エンドエフェクターとワークピースの重量が含まれています。
自動車および金属加工産業における実質的な部品を処理するために。
最大範囲は1777.5mmで,このロボットは広大な作業封筒を提供します.それは容易に広いコンベヤーベルトを横断したり、作る大きなCNC機械に深く到達することができます
現在、大規模な産業用フローアウトで利用可能な最も多用途のコラボレーティブロボットの1つです。
これらの2つの要因の組み合わせは、コボットカテゴリーで「重量級」になります。多くのコラボレーティブロボットは小さなタスクに限定されていますが、S20-180 Proは
人間・ロボット協力の安全利益を犠牲にすることなく,パレット化と部品移転に必要な筋肉.
S20-180 Proは重荷でどのように精度を維持しますか?
S20-180 Proは,位置検出のために極度の解像度を提供する20ビットの絶対エンコーダを使用しています.これらのエンコーダは、制御システムが正確な角度を監視することを可能にします
サブミリメートルの精度のあらゆる関節は、腕が完全に20 kgの負荷で伸ばされるときでも。
さらに,ロボットは先進的な運動補償と振動抑制アルゴリズムを使用しています.これらのソフトウェア機能は、重い原因で引き起こされる動的ストレスを識別します。
ペイロードおよびモーターのトルクをリアルタイムで調整して、滑らかな動きおよび高い轨道の正確性を保証する動動動性に対抗します。
出荷の前に、各ユニットはレーザートラッカーを使用して厳格な運動校正を受けます。このプロセスは、各ロボットのためのカスタム数学プロフィールを作成し、補償します
微鏡機械的変化とロボットの寿命全体で±0.05 mmの繰り返し性を維持することを確保します.
S20-180 Proはセーフティケージなしで使用することは安全ですか?
S20-180 Proは,EN ISO 13849-1 PLd Cat.3安全基準に準拠する完全に認定されたコラボレーティブロボットです.それはすべての6つの関節に統合されたトルクセンサーを特徴としています
外部接触を検出し、近くの人員の負傷を防ぐために即時停止を引き起こします。
ユーザーは「セーフティゾーン」をプログラムすることができ、ロボットは人間がその区域に入ったときに自動的に速度を減らします。これにより、柔軟な作業環境が可能になります。
一人でフルスピードで実行できますが、協力タスクの間により安全で力制限モードに切り替えます。
しかしながら、工業施設には常に正式なリスク評価が必要です。ロボット自体が安全である間、特定のアームの端のツールまたは重い尖い端
ワークピースはまだ完全なコンプライアンスを確保するためにライトカーテンやエリアスキャナーのような追加の安全措置を必要とする場合があります.
S20-180 Proはどのような通信プロトコルをサポートしますか?
現代的なスマート工場にシームレスに統合するために,S20-180 Proはいくつかの業界標準のプロトコルをサポートしています.これらには、Modbus TCP/RTU、EtherCAT、およびRS485が含まれています。
ロボットがPLC、ビジョンシステム、および他の工場全体の自動化コントローラーと通信することを可能にします。
EtherCATの含み込みは,高速同期にとって特に重要です.ロボットは第7軸線形レールまたは2軸溶接と完璧な調和で働くことができます
ポジショナーは、より大きく、高度に調整された多軸モーション制御システムの一部を作ります。
さらに、ロボットはE-Noesisクラウドプラットフォームと互換性があります。これは遠隔データ収集とパフォーマンス監視を可能にし、予測メンテナンスを可能にします
システムの故障につながる前に潜在的な機械的な問題を特定することによってダウンタイムを短縮する戦略。
S20-180 Proを新しいタスクにプログラムするのはどれくらい簡単ですか?
S20-180 Proは,非常に短時間でマスターできるユーザーフレンドリーなグラフィカルインターフェースを備えています.豊富なコーディング経験を持たないオペレータでも複雑なプログラムを作成できます。
10.1インチの教えペンダント画面上の直感的なドラッグ・アンド・ドロップ機能ブロックを使用してモーションシーケンス。
より速い設定のために,ロボットは"アジャイルマニュアルガイダンス"をサポートしています.重量は59kgにもかかわらず,アームはバランスを取り,オペレーターがロボットを物理的にパスを通じて移動できます. 「 The
ロボットは精度のためにソフトウェアで微調整することができるこれらのポイントを記録します。
ソフトウェアには,パレット化や機械の傾向などの一般的なタスクのための専門パッケージも含まれています.これらのウィザードは、設定プロセスを通じてユーザーをガイドし、
ボックスの次元またはパレットのパターンは、自動的に必要な動きの経路および安全の境界を生成します。
このロボットの環境要件は何ですか?
S20-180 ProはIP54を評価しており、内部モーターと電子機器を防防防防防防防止します。これにより、標準的な工場環境に適しています。
空気中の粒子や水分が存在する金属加工店を含む。
動作温度範囲は0〜50℃です。忙しい生産床の熱を処理できますが、制御キャビネットを確保することが重要です
適切な換気を持ち,産業用オーブンのような高熱源の直接隣に置かれていません.
高湿度または化学蒸気の環境では、ユーザーは保護"ロボットスーツ"を選択できます。これらのカスタムフィットカバーはロボットの仕上げおよび接合シールを保護し、
S20-180 Proは,長期的な機械的信頼性を損なわずに,より攻撃的な環境で動作します.
S20-180 Proは高速パレット化を処理できますか?
最大ツールエンド速度は3.2m/sで、S20-180 Proはクラスで最も速いコラボレーティブロボットの1つです。この高速は、その 20 kg のペイロードと組み合わせて、それを許可します
ほとんどの大量包装および物流ラインのサイクル時間要件を満たします。
ロボットの長距離1777.5mmは,標準パレットの4つの角にすべて到達し,重要な高さにスタックすることができるため,パレット化の主要な利点です.この範囲は減少
高価なリフティングコラムまたは複雑な複数ロボットハンドオフシステムの必要性。
ESTUNは,このモデルのために特別にプロフェッショナルなパレット化ソフトウェアパッケージを提供しています.これにより、ユーザーは複雑なスタッキングパターンを定義し、混合サイズのボックスを処理することができます。
パレットスペースを最適化し,手動介入なしで輸送のために荷物が安定することを確保します.
S20-180 Proにはどのような電源が必要ですか?
S20-180 ProとそのCOB-A20制御キャビネットは,通常標準的なAC100-240V電源を必要とします.この幅広い入力範囲により、電気システムと互換性があります。
世界中で、国際的なOEMおよびシステム統合者のための理想的な選択です。
操作中の典型的な消費電力は約0.75kWであり,このような高いペイロードと範囲を持つロボットにとっては驚くほど効率的です.この低エネルギー足跡
全体的な運用コストの低減に貢献し,企業の"グリーン"製造イニシアティブを支援します.
電磁干渉がロボットの精密センサーに影響を与えることを防ぐために専用および接地電源回路を使用することが非常に推奨されます。正しい
20ビットエンコーダーは,産業級の繰り返し可能性に必要な安定した正確なフィードバックを提供するために,接地は不可欠です.
S20-180 ProはS10-140 Proとどのように比較されますか?
S20-180 ProはS10-140 Proのより大きく、より強力な兄弟です。S10モデルは10kgのペイロードと1400mmの範囲を提供しますが、S20はそのペイロードを倍増します。
20キロ、大きなワークピースに適した1777.5mmまでの範囲を拡大します。
機械的に、S20はS10の38 kgに比べて59 kgでより重いユニットです。この余分な重量は、より大きな負荷およびより長い時間を処理するために必要な構造的堅度を提供するために使用されます
産業用作業に必要な±0.05 mm の繰り返し性を損なわずに拡張します。
この2つの間の選択は、特定のアプリケーションによって異なります。高精度溶接または小さな部品組み立てを行っている場合、S10はより敏捷かもしれません。しかし、For
重い部品の転送および大規模なパレット化、S20-180 Proは優れた産業選択です。
ロボットの6軸フランジにはどのようなメンテナンスが必要ですか?
第6軸フランジはロボットの最も活動的な部分であり,アームの端のツールリングが付属する場所です.それはいかなるそれそれそれそれそれそれそれそれそれそれはそれそれそれはそれそれそれそれそれそれはそれそれそれそれはそれそれはそれそれそれそれそれそれそれそれそれそれそれそれそれはいか
手首が一定の回転圧力の下にある特に高速アプリケーションでは。
ツールへのケーブルが固定され,完全な±360度回転のために十分なツツツール回転が安定されていることを確認します.防止のために「ケーブル管理システム」を使用することが推奨されます
最終的に電気故障または短回路につながることができるロボットアームに対して摩擦からのワイヤー。
分配または汚れた環境では,工具変更プロセスを妨げる可能性のある材料の蓄積を防ぐために,フランジ領域を定期的にクリーンする必要があります.保持する
ISO 9409-1-50-6-M6の取り付け表面は完全な機械的接続を保証し、システムの全体的な精度を維持します。

 +86 010-64225983
+86 010-64225983 +8613811814778
+8613811814778
 中国北京市朝陽区麗園コミュニティビル26
中国北京市朝陽区麗園コミュニティビル26