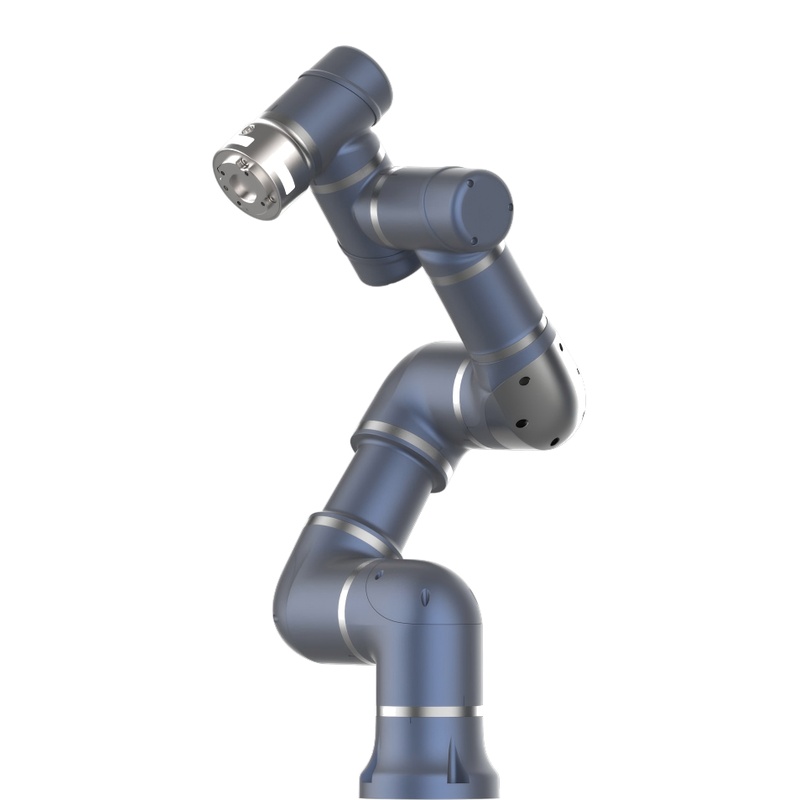
ESTUN S3-60 Pro 6軸産業ロボット:レーザーマーキングのための精密ソリューション
ESTUN S3-60 Proは,精密産業アプリケーションの厳格な要求を満たすために特別に設計された高性能6軸コラボレーティブロボットです.3kgの特徴
ペイロードおよび575.8mmの範囲、このモジュールはレーザーの印、小部品組み立ておよび精度が最も重要な電子テストのような専門的なタスクで優れています。
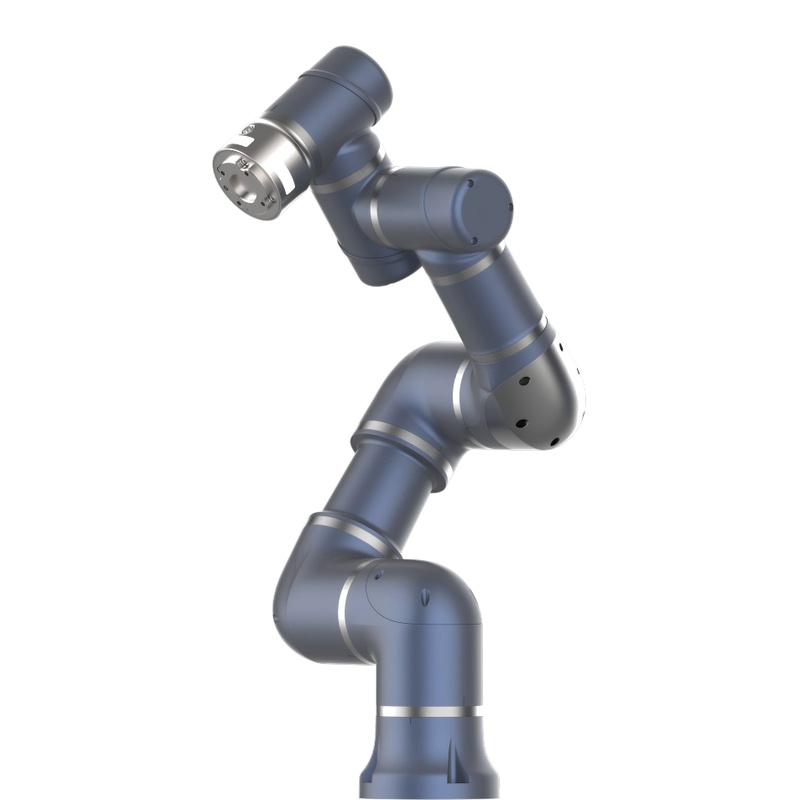
全6軸に組み込まれた高精度トルクセンサーを搭載したS3-60 Proは,比類のない安全性と手動ガイダンス機能を提供しています.コンパクトな設計と柔軟性
取り付けオプションは,電子および金属加工産業のための信頼性の高い自動化ソリューションを提供する既存の生産ラインにシームレスに統合することを可能にします.
詳細な技術仕様
S3-60 Proは産業級のモーション制御と繰り返し性によって定義されています。軽量ロボットセクターのリーダーとなる主要なパラメータは:
軸の数:6軸
評価されたペイロード:3 kg
最大範囲:575.8 mm
ポーズの繰り返し性:±0.03 mm
保護クラス:IP54
ロボット重量:14 kg
Max.Toolの速度:2.0 m/s
安全認証:EN ISO 13849-1 PLd Cat.3
コミュニケーション:Modbus RTU、RS485、TCP/IP
動作温度:0°Cから50°C
高度な機能とエンジニアリングの卓越性
精度はS3-60 Proの主要な利点です。20ビットエンコーダーと先進的な運動補償技術を活用することにより、ロボットは安定した轨道を維持します。
高速。このレベルの制御はレーザーマーキングに不可欠で,わずかな偏差でも製品の欠陥につながることができます.
"Pro"シリーズは,統合されたビジョンシステムの互換性を備えており,ロボットが構造のない環境でワークピースを識別し,マークすることができます.アジャイルなマニュアルガイダンス
オペレータは手で複雑なパスを教えることを可能にし、小さなバッチ生産ランのためのセットアップ時間を大幅に短縮します。
調整可能な衝突検出と力制御によって安全性が優先されます.ロボットは障害物があれば即座に動きを停止し、リアルタイムで外部抵抗を監視します
検出された。このコラボレーティブな性質は,多くの低速産業環境で大きなセキュリティケージの必要性を排除します.
主なアプリケーションシナリオ
レーザーマーキング業界では,S3-60 Proは,シリアル番号,QRコード,ロゴを様々な材料にエッチングするために必要な安定した手を提供します.その高い繰り返し性
マーキングが自動車部門の厳格な追跡可能性の要件を満たす数千のユニットに一致することを確保します。
電子製造では,S3-60 Proを使用して,微妙なピックアンドプレイス操作とPCBテストを行っています.ロボットの小さな足跡と軽量なアームにより動作できます
組み立てベンチの人間のオペレーターと並んで、ワークスペースの完全な再設計を必要とせずに生産性を高めます。
研究室自動化と薬品包装もS3-60 Proのクリーンな動きとIP54保護の恩恵を受けます。試管および小さな医療を処理します
極端な注意を持つ部品は、重要な診断プロセスの汚染および人間の間違いのリスクを減らします。
インストールと操作ガイドライン
S3-60 Proを指定されたISO 9409-1-50-4-M6フランジコネクタを使用して安定した振動のない表面に取り付けます。ロボットは床、天井、または壁の取付けを支えますが、
方向は制御ソフトウェアで正確に設定され,重力補償機能を正確に保証する必要があります.
提供されたハイフレックスケーブルを使用してロボットをS3E制御キャビネットに接続します.接地線が電磁干電電を防ぐために安全に付着されていることを確認します。
最初のスタートアップ中,ロボットを250mm/sの減速で動作して,プログラムされた経路と安全ゾーンが正しいか確認します.
プログラミングのために直感的なグラフィカルインターフェースを使用します。レーザーマーキングのタスクのために、作り付けのデジタルI/O.Thisを介してレーザートリガー信号とロボットの動きを同期します
レーザーはロボットが正確なマーキング座標に達したときにのみ発火します。
重要な安全とメンテナンスノート
ロボットの範囲内で働くとき、安全靴やヘルメットを含む適切な安全装備を常に着用してください。スタッフは ESTUN または
S3-60 Proシステムの安全設定をプログラムまたは変更しようとする前に認可されたパートナー。
評価された3kgのペイロードを超えないでください,これはハーモニック減速器の早期磨損および妥協の繰り返し性につながることができます.ケーブルの磨損の兆候を定期的に検査する
または湿気、特に接頭が一定の機械的圧力の下にある高サイクルアプリケーションで。
すべてのモーションプログラムとシステム変数の定期的なデータバックアップを USB ドライブまたはクラウドストレージに実行します.これは、予期しない停電の場合にデータの損失を防ぐ
またはハードウェアの故障、生産が最小限のダウンタイムで迅速に復元することができることを確保します。
よくある質問(FAQ)
S3-60 EcoとS3-60 Proの主要な違いは何ですか?
S3-60 Proは、Ecoと比較して衝突検出および手動ガイダンスのための優れた感度を提供するすべての軸に先進的なトルクセンサーを装備しています
モデル。これにより、Proバージョンは、人間とロボットの相互作用が頻繁であり、高い安全基準が必要なコラボレーション環境により適しています。
さらに、Proモデルはより高い精度の校正を特徴としており、レーザーマーキングや精密ななどの複雑なタスクに不可欠な産業級の轨道精度を達成します。
アセンブリ。両方は同じ物理的な範囲とペイロードを共有しているが,Proバージョンは,ハイエンド自動化に必要な強化されたソフトウェア機能を提供しています.
この2つの間の選択は,アプリケーションの複雑さと必要な安全統合のレベルによって異なります.コストが主要なシンプルなピックアンドプレイスタスクのため
要因、エコは十分かもしれませんが、高精度マーキングのために、プロは推奨された産業標準です。
ESTUN S3-60 Proはサードパーティのレーザーマーキングシステムと統合できますか?
S3-60 Proは,Modbus RTU,RS485,およびデジタルI/Oをサポートする多様な通信アーキテクチャを備えており,ほとんどの産業用レーザーソースとインターフェースすることができます.あなた
標準的なトリガー信号を使用してロボットの動きをマーキングプロセスと簡単に同期することができます。
統合は、ロボットのオープンソフトウェアプラットフォームによってさらに簡素化され、カスタムコマンドとスクリプトの作成を可能にします。ロボットをプログラムすることができます。
完全な同期を保証する次の位置に移動する前に、レーザーからの「準備ができた」信号を待っています。
多くのシステム統合者は,レーザーが静止している間,またはその逆,ワークピースを処理するためにS3-60 Proを使用します.6軸の柔軟性により、3D空間で部品を回転できます。
レーザーが1つのサイクルで製品の曲面または複数の側面をマークすることができます。
S3-60 Proを電子産業に適したものは何ですか?
S3-60 Proのコンパクトな重量14kgと小さな足跡は,通常電子アセンブリラインで見られる狭いスペースに理想的です.それは直接に取り付けることができます
既存のワークテーブルは、大規模な構造修正の必要なしで6軸の巧妙性を提供します。
プラスまたはマイナスゼロポイントゼロ3ミリメートルの高い繰り返し性は,微鏡部品の取り扱いや精密な溶接またはテストを行うために非常に重要です.この精度
製造欠陥の率を減らすために,ロボットはPCB上の小さな接触パッドを一贯に打つことができます.
さらに,ロボットのスムーズなモーション制御は,敏感な電子部品を損傷させる可能性のある振動を最小限に抑えます.そのコラボレーティブな機能は、安全に同時に動作することもできます。
人間のテスター、人間は複雑な品質検査および最終的な調整に焦点を当てる間、繰り返しのタスクを処理します。
S3-60 Proでマニュアルガイダンス機能はどのように機能しますか?
手動ガイダンスにより,操作者はロボットアームを望ましい位置に物理的に移動させ,その後,システムは動きパスの一部として記録します.これは、The
人間の手による力を検出する高解像度トルクセンサー。
この「ドラッグ・アンド・ドロップ」の教学スタイルは、ロボットの軸を軸ごとに動かすために伝統的な教えペンダントを使用するよりはるかに速いです。レーザーマーキングパスに特に有用です
手動でプログラムするのが難しい複雑な轮廓や不規則な形状に従う。
パスが教えられたら,オペレータはグラフィカルユーザーインターフェースを通じてポイントを精度化することができます.このハイブリッドアプローチは、人間の直感と
ロボット精度により、S3-60 Proは広範なプログラミング経験を持っていないスタッフにアクセスできます。
S3-60 Proは長期的な信頼性を確保するためにどのようなメンテナンスが必要ですか?
定期的なメンテナンスには,ロボットの接合物とケーブルをチェックして,グリース漏れや機械的な磨損の兆候を検査することが含まれています.S3-60 Proは高品質の減速器を使用し、
モーター、主要な焦点は環境を清潔に保つことおよび評価温度の内にあるべきです。
内部ソフトウェアは、最新のパフォーマンス改善と安全性へのアクセスを確保するために、ESTUNの最新バージョンを最新に保持する必要があります。
パッチ。定期的な校正チェックは、ロボットの指定したポーズの繰り返し性を数年間維持するためにも推奨されています。
また,緊急停止ボタンと衝突検出センサーの機能性を予定された間隔で確認することも重要です.これらの安全メカニズムは
操作性は、ロボットと共有産業ワークスペースで働く人員の両方を保護するために不可欠です。
S3-60 Proはリモートモニタリングと診断をサポートしていますか?
はい,S3-60 ProはE-Noesisクラウドプラットフォームに接続することができ,ロボットの操作状態とパフォーマンスメトリックに関するリアルタイムデータを提供します.これにより、施設
生産効率を監視し,重要なダウンタイムを引き起こす前に潜在的な問題を特定する管理者.
リモート診断により,技術サポートチームは,ロボットのログとシステム変数を遠くから分析できます.これにより、ソフトウェア関連の問題や
現場訪問の必要なしで構成エラー,時間と旅行費の両方を節約します.
内部ネットワークでは,標準的なTCP/IPプロトコルをサポートし,ローカルSCADAまたはMESシステムに統合することができます.このレベルの接続性は重要な要素です
より応答性が高く、データ主導の製造環境を可能にするインダストリー4.0。
ロボットは電気停止や緊急停止をどのように処理しますか?
停電や緊急停止の場合,S3-60 Proはすべての軸に電磁ブレーキを装備しています.これらのブレーキは即座にロボットを保持するために接続します
重力の重量の下で腕が崩壊することを防ぐ現在の位置。
電力が回復したら,ロボットが作業を再開する前に,システムは安全チェックシーケンスを通過します.操作者は手動で故障を認識し、
システムをリセットし、ロボットが再び動き始める前に作業領域が明確であることを確保します。
制御ソフトウェアは,プログラムの現在の状態も保存し,ロボットがほとんどの場合停止した場所から続けることができます.この機能は維持に不可欠です
生産の継続性と中断中にプロセス中のワークピースの損失を防ぐ。
S3-60 Proはどのような取り付け方向をサポートしていますか?
S3-60 Proは最大の柔軟性のために設計され,床,天井,壁の位置を含む任意の方向に取り付けることができます.これにより、エンジニアは最適化
ワークスペースおよびマーキングプロセスのための最も効率的な角度からワークピースに到達します。
ロボットを非標準的な方向に取り付けるとき,ユーザーは制御キャビネットの設定で取り付け角度を指定しなければなりません.これは、ロボットの内部重力を確保します。
モデルは正しく調整され、力センサーが重力と外部衝突を区別することができます。
天井マウントを使用することは,レーザーマーキングセルで特に人気があります.この設定により、ロボットは
床に立つ位置からアクセスできない深い部分や深深い内床床に入ることができません。
S3-60 Proを操作する環境要件は何ですか?
S3-60 ProはIP54評価を受けており、それはあらゆる方向からの防防防SSSS3-60 ProのSSSS3-60 Proはあらゆる方向からのSSSSS3-60 Proから防止されています。それはほとんどの工場環境のために十分に堅固であるが、それはすべきではない
清掃中に液体に浸泡したり、高圧水ジェットに暴露した。
動作温度はゼロから50度の間に維持され,非凝縮湿度レベルは70%未満であるべきです.過熱が影響を与える
電子ドライブの性能は、極端な冷たさが接合極極接接続極極めて粘着性があまりにも粘着性が高すぎることを引き起こすかもしれません。
ロボットが高レベルの電磁干渉の環境で使用されている場合は,すべての通信ケーブルがシールドされ,適切に接地されていることを確認してください.これは防ぐ
センサーの精度とモーション制御システムの安定性に影響を与える信号信信信号信信信信号ノイズ。
S3-60 ProのI/O機能をどのように拡大できますか?
S3-60 Proは,フランジと制御キャビネットに位置する標準的なデジタルおよびアナログI/Oポートを備えています.追加の信号を必要とするより複雑なアプリケーションでは、
システムはModbusやRS485のような産業通信プロトコルを通じて拡張をサポートします。
ユーザーは,外部I/OモジュールまたはPLCをS3E制御キャビネットに接続し,より幅広いセンサー,アクチュエータ,周辺機器を管理できます.この拡張性は
S3-60 Proは,ローカライズされた自動化セルまたはマーキングステーション全体を制御するための多用途ハブです.
さらに,ロボットのフランジは,ツールエンドデバイスのための専用コミュニケーションインターフェースを備えています.これは、グリッパーや専門センサーの直接制御を可能にします。
運動を妨げることができるロボットアームの長さを下に長い外部ケーブルを走行する必要があります。

 +86 010-64225983
+86 010-64225983 +8613811814778
+8613811814778
 中国北京市朝陽区麗園コミュニティビル26
中国北京市朝陽区麗園コミュニティビル26